۱۴۰۰/۱۲/۰۳ - - علی رضا نقش نیلچی -
روز دیگر با یکی از دانش آموزان در مورد ماتریس های چرخشی گپ طولانی ای داشتم. آنها در درس فیزیک مهندسی به نام دینامیک به عنوان راهی برای یافتن اجزای بردارها نسبت به محورهای چرخیده مطرح شده بودند. او چند یادداشت از یکی از معلمان MLC من روی یک تکه کاغذ خط خورده بود که متأسفانه در واقع برای وضعیت او درست نبود. من دقیقاً میدانم چرا این اتفاق افتاد: ماتریسهای چرخشی هم در Dynamics و هم در Maths 1B استفاده میشوند، اما آنها به روشهای مختلفی استفاده میشوند (در واقع، دو کاربرد متفاوت فقط در Maths 1B وجود دارد!). وقت آن است که برای رفع این سردرگمی تلاش کنم، به خصوص که سه دانشجوی دیگر در هفته گذشته دقیقاً در مورد این موضوع از من سؤال کرده اند!
در Maths 1B، شما در مورد تبدیل های خطی ، که نوع خاصی از تابع هستند که بر بردارها در برخی ابعاد اعمال می کنید تا بردارهایی را در برخی ابعاد تولید کنید، یاد می گیرید. به نظر می رسد که تمام تبدیل های خطی را می توان با نمایش بردار به عنوان ستونی از مختصات و ضرب آن در یک ماتریس توصیف کرد. هر تبدیل خطی ماتریس مخصوص به خود را دارد که برای همه بردارهایی که روی آنها عمل می کند کار می کند. چرخشها یک نوع تبدیل خطی هستند و در دو بعد فرمولی بر اساس زاویهای که میچرخانید وجود دارد که به شما میگوید ماتریس چیست. من فقط چنین ماتریسی را در تصویر اینجا قرار داده ام.
یکی از دلایل این کار این است که ضرب یک ماتریس در بردارهای پایه استاندارد (1,0) T و (0,1) T به ترتیب ستون های اول و دوم ماتریس را به شما می دهد. اما ضرب در ماتریس همان اثر تبدیل چرخش را دارد، بنابراین برای اینکه بفهمیم این ستون ها واقعا چه هستند، تنها کاری که باید انجام دهیم این است که نقاط (1,0) و (0,1) را بچرخانیم. اگر این کار را انجام دهید، به دلیل مثلثات، دو نقطه
(cos θ، sin θ) و (-sin θ، cos θ)
به دست میآید که در واقع ستونهای ماتریس هستند.
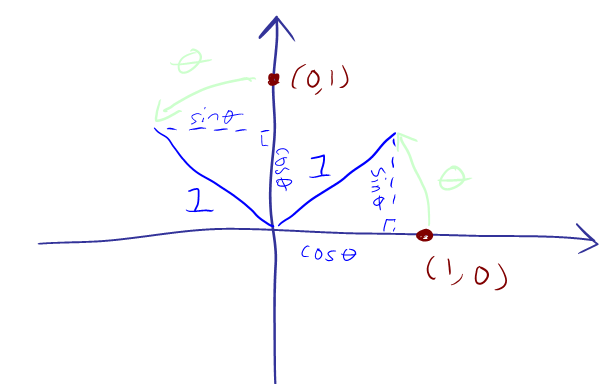
اجازه دهید قبل از حرکت مطمئن شویم که اینجا چه خبر است: شما یک نقطه در صفحه دوبعدی دارید، مختصات آن را به عنوان یک ستون در نظر می گیرید، این ستون را در ماتریس ضرب می کنید، و مجموعه جدیدی از مختصات را تولید می کنید. یک نکته جدید است بنابراین ماتریس شما در واقع نقطه شما را از یک مکان به مکان دیگر منتقل می کند . نقطه با مختصات (1,0) به نقطه دارای مختصات حرکت می کند
(cos θ، sin θ).
نقطه با مختصات (0،1) به نقطه دارای مختصات
(-sin θ، cos θ)
حرکت می کند .
بنابراین اکنون داریم که یک ماتریس چرخشی دارای cos θ در مورب اصلی، sin θ در گوشه پایین سمت چپ و – sin θ در گوشه بالا سمت راست است. و به شما می گوید که یک نقطه با چرخش θ در خلاف جهت عقربه های ساعت به کجا می رود. (شایان ذکر است که بر روی اجزای بردارهایی که به صورت فلش تصور می شوند نیز به خوبی کار می کند.)
مشکل این است که در دینامیک، یک ماتریس چرخش کاملاً شبیه این نیست! به طور خاص، علامت منفی در گوشه مقابل است. چرا؟
پاسخ این است که در دینامیک، ماتریس چرخش توصیفی از تبدیل خود نقاط یا فلش ها نیست، بلکه توصیفی از چگونگی تغییر مختصات آنها هنگام تبدیل محورهای مختصات است . خود نقاط اصلا حرکت نمی کنند، این محورهای مختصات هستند که حرکت می کنند و ما فقط نقاط را با مختصات جدید دوباره برچسب می زنیم.

دلیل اینکه این کار مجدداً به دلیل بردارهای پایه استاندارد است. نقطه (1,0) با توجه به محورهای جدید مختصات آن دوباره محاسبه میشود و مختصات آن (cos θ, -sin θ) است. در حالی که نقطه (0،1) نیز مختصات آن دوباره محاسبه شده و مختصات آن (sin θ، cos θ) است.
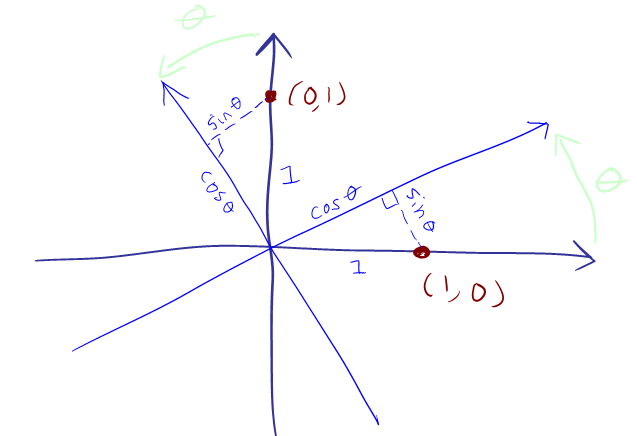
ممکن است متوجه شوید که این دقیقاً همان چیزی است که مختصات اگر خود نقاط را بچرخانید، اما در جهت مخالف ماتریس چرخش اصلی است. این منطقی است. اگر سر خود را بچرخانید تا با محورهای مختصات جدید مطابقت داشته باشد، دقیقاً این اتفاق افتاده است. اساساً، اگر محورهای مختصات را به یک جهت بچرخانید، نقاط نسبت به محورها به سمت دیگری حرکت می کنند.
و این پایان داستان خواهد بود، با این تفاوت که در شما محورهای مختصات را نیز می چرخانید، و با این حال، ماتریس چرخش به نوعی هنوز مانند آنچه در دینامیک وجود دارد، نیست! چرا؟
دلیل آن این است که در ریاضیات 1B محورها را در چارچوب معادلات منحنی میچرخانیم، و این وضعیت کاملاً متفاوت از زمانی است که شما محورها را در بافت خود نقاط میچرخانید.
تصور کنید من معادله ای دارم که یک منحنی را توصیف می کند. یک نقطه اگر مختصات آن معادله را برآورده کند بخشی از منحنی است و اگر مختصات آن معادله را برآورده نکند بخشی از منحنی نیست . اما اگر همه نقاط را با مختصات جدید با توجه به مجموعه جدیدی از محورها دوباره برچسب بزنم چه می شود؟ من یک معادله برای منحنی خود می خواهم به طوری که یک نقطه در منحنی باشد اگر مختصات جدید آن معادله جدید را برآورده کند. چگونه به آن دست پیدا کنم؟ خوب من قبلاً یک معادله دارم، فقط از نظر مختصات قدیمی است. بنابراین اگر نقطه ای در مختصات جدید داشته باشم، برای اینکه بگویم در منحنی است یا نه، فقط باید بفهمم مختصات قدیمی چیست و زیر آنهابه معادله قدیمی باید بتوان یک معادله ایجاد کرد که هر دوی این اقدامات را در بر گیرد - انتقال به سیستم مختصات قدیمی و فرورفتن در معادله قدیمی.
متوجه شدی آنجا چه گذشت؟ برای ایجاد معادله ای که همان منحنی را نسبت به محورهای جدید توصیف می کند، مجبور شدم با مختصات جدید شروع کنم و آنها را به مختصات قدیمی تبدیل کنم . بگذارید تکرار کنم: باید از جدید به قدیمی می رفتم . ماتریس تبدیل مختصات در دینامیک از قدیمی به جدید می رود. برای رفتن در جهت مخالف باید منهای را در گوشه مخالف داشته باشم.
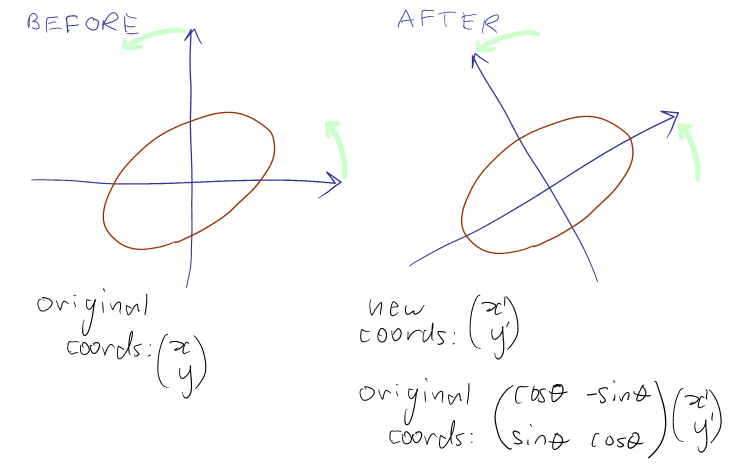
بنابراین به همین دلیل است که ماتریس ها متفاوت هستند. در دینامیک شما محورها را جابه جا می کنید اما نقاط را نه، و مختصات جدیدی برای نقاط پیدا می کنید. در ریاضیات 1B شما نقاط را حرکت می دهید، نه محورها، بنابراین به نظر می رسد که چرخش در جهت دیگر باشد. یا در ریاضیات 1B محورها را جابهجا میکنید ، اما از قبل مختصات جدید را میدانید و مختصات قدیمی را میخواهید، بنابراین در واقع محاسبه را در جهت مخالف انجام میدهید.
















 هستند را توابع پارامتری مینامند. در این حالت، مشتق
هستند را توابع پارامتری مینامند. در این حالت، مشتق نسبت به \
نسبت به \ از رابطهٔ زیر قابل محاسبه است:
از رابطهٔ زیر قابل محاسبه است:
 تابعی از
تابعی از به
به باشد، آنگاه مشتق جهتدار
باشد، آنگاه مشتق جهتدار  باشد، دیگر مشتق جهتدار نمیتواند به تنهایی، تصویر کاملی از رفتار تابع نشان دهد. مشتق کل، که دیفرانسیل کل نیز نامیده میشود با در نظر گرفتن رفتار تابع در تمام جهتها میتواند تصویر کاملی از رفتار تابع ارائه کند.
باشد، دیگر مشتق جهتدار نمیتواند به تنهایی، تصویر کاملی از رفتار تابع نشان دهد. مشتق کل، که دیفرانسیل کل نیز نامیده میشود با در نظر گرفتن رفتار تابع در تمام جهتها میتواند تصویر کاملی از رفتار تابع ارائه کند. نسبت به متغیر
نسبت به متغیر  ، متغیرهای دیگر ثابت در نظر گرفته نمیشوند بلکه به
، متغیرهای دیگر ثابت در نظر گرفته نمیشوند بلکه به 

 میزان تغییرات
میزان تغییرات تعریف شده باشد و
تعریف شده باشد و برداری شامل نقطهٔ
برداری شامل نقطهٔ  باشد، مشتق جهتدار
باشد، مشتق جهتدار 
 باید متعلق به
باید متعلق به  فاصلهٔ علامتدار
فاصلهٔ علامتدار  و
و  و در غیر این صورت
و در غیر این صورت  در نظر گرفته میشود.
در نظر گرفته میشود. ، رابطهٔ ضمنی آن به صورت
، رابطهٔ ضمنی آن به صورت  قرار میگیرد. برای محاسبهٔ مشتق توابع ضمنی دو روش کلی وجود دارد:
قرار میگیرد. برای محاسبهٔ مشتق توابع ضمنی دو روش کلی وجود دارد: را بدست میآوریم. (اگر بخواهیم مشتق را نسبت به
را بدست میآوریم. (اگر بخواهیم مشتق را نسبت به  و
و  خواهد بود)
خواهد بود)

 باشد. در تعریفی شهودی خواهیم داشت تابعی پیوستهاست که هر تغییر کوچک در ورودی اش، تغییری کوچک در خروجی اش ایجاد کند، و بتوان نمودار آن را بدون برداشتن قلم از روی کاغذ رسم کرد.
باشد. در تعریفی شهودی خواهیم داشت تابعی پیوستهاست که هر تغییر کوچک در ورودی اش، تغییری کوچک در خروجی اش ایجاد کند، و بتوان نمودار آن را بدون برداشتن قلم از روی کاغذ رسم کرد. پیوسته است، اگر به ازای هر دنباله
پیوسته است، اگر به ازای هر دنباله  که
که ، نتیجه بگیریم
، نتیجه بگیریم  .
. 
 و
و  دو نمونه آشنا از توابع کوژ هستند
دو نمونه آشنا از توابع کوژ هستند در این وبلاگ شما با ریاضی در سطوح مختلف آشنا خواهید شد.
در این وبلاگ شما با ریاضی در سطوح مختلف آشنا خواهید شد.